In News, PhD Thesis by cirs
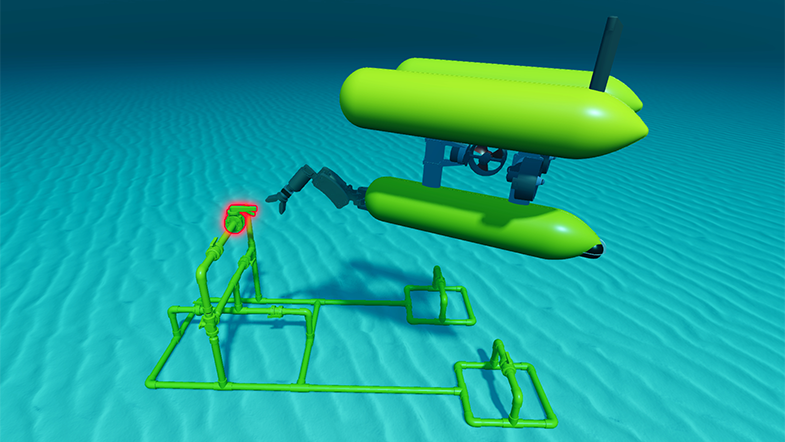
DOCTORAL THESIS: Automated 3D object recognition in underwater scenarios for manipulation
By Khadidja Himri Supervised by Dr.Pere Ridao / Dr.Nuno Gracias Abstract In recent decades, the rapid development of intelligent vehicle and 3D scanning technologies has led to a growing interest in applications based on 3D point data processing, with many applications such as augmented reality or robot manipulation and obstacle…