In AUV, CIRS, News, THESIS by cirs-media
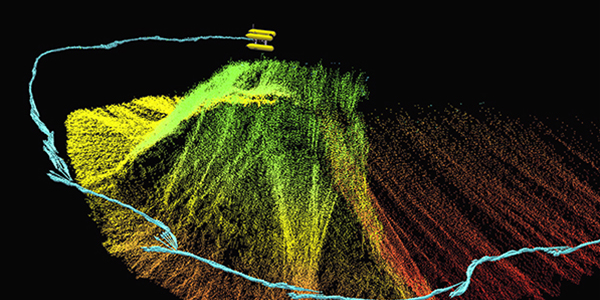
Angelos Mallios defends his PhD Thesis “Sonar Scan Matching for Simultaneous Localization and Mapping in Confined Underwater Environments”
This thesis presents the development of a localization and mapping algorithm for an autonomous underwater vehicle (AUV). It is based on probabilistic scan matching of raw sonar scans within a pose-based simultaneous localization and mapping (SLAM) framework. To address the motion-induced distortions affecting the generation of full sector scans,…