In CIRS, News, Sonar Mosaicing, THESIS, Underwater Mapping by cirs-media


Our researchers Pere Ridao and Marc Carreras are currently in Rome in the Workshop on EU Funded Marine Robotics and Applications (EMRA 2014). Researchers and users of marine robotic technology are invited to EMRA2014. The workshop shall summarize current EU FP7 marine robotics research, and provide a platform for marine…

The European Commission and 180 companies and research organisations (under the umbrella of euRobotics) today launch the world’s largest civilian research and innovation programme in robotics. Covering manufacturing, agriculture, health, transport, civil security and households, the initiative – called SPARC – is the EU’s industrial policy effort to strengthen Europe’s…
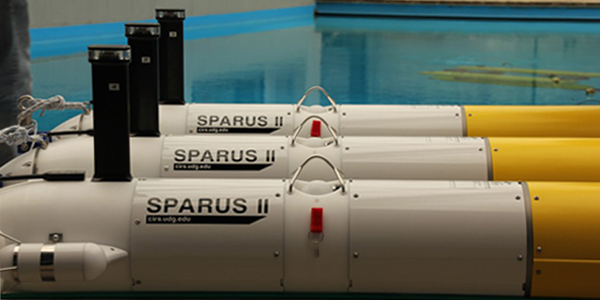
Last week we received the visit of the teams that are going to compete in euRathlon with our SPARUS II AUVs. We had to say goodbye to our prototyes that are now being tested in their final destinations! Good luck and thanks to euRathlon team for trusting us! …