HOME
About us
Team
RESEARCH
Careers
AUVs
Girona 500 AUV
Sparus II AUV
Data Processing
Sonar mosaicing
Seabed mapping in 2D and 3D
MosaicViewer
News
Contact
HOME
About us
Team
RESEARCH
Careers
AUVs
Girona 500 AUV
Sparus II AUV
Data Processing
Sonar mosaicing
Seabed mapping in 2D and 3D
MosaicViewer
News
Contact
Blog
Home
>
News
>
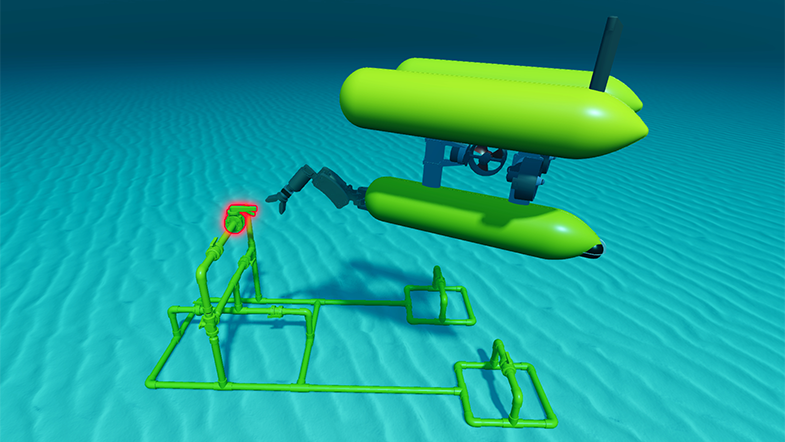
DOCTORAL THESIS: Automated 3D object recognition in underwater scenarios for manipulation
>
img-khadidja copy
10
December
In by
cirs
img-khadidja copy