From June 16th to 19th, Valerio Franchi and Alaaeddine El Masri El Chaarani participated at OCEANS 2025, held in Brest, France.
Valerio presented the paper titled “Collision Avoidance with Adaptive Potential Fields for Underwater Vehicles Using Omnidirectional Vision”. The work, co-authored by Aurora Bottino (a Master student from Università degli Studi di Genova, Italy), and members of our research group Eduardo Ochoa, Rafael Garcia and Nuno Gracias, was accepted to the main technical session. It presents an algorithm designed to provide access to remotely operated underwater vehicles (ROVs) to any non-skilled human operator. Moving an underwater vehicle close to underwater structures to capture images is a challenging task that compromises the safety of the vehicle. For this reason, highly skilled human operators are chosen for this task. We developed a collision avoidance system that uses visual information of its surroundings from an omnidirectional camera to correct the robot’s direction of travel to maintain ROV/AUV safety while in proximity to obstacles, such that anybody can operate one without there being any collision risk.

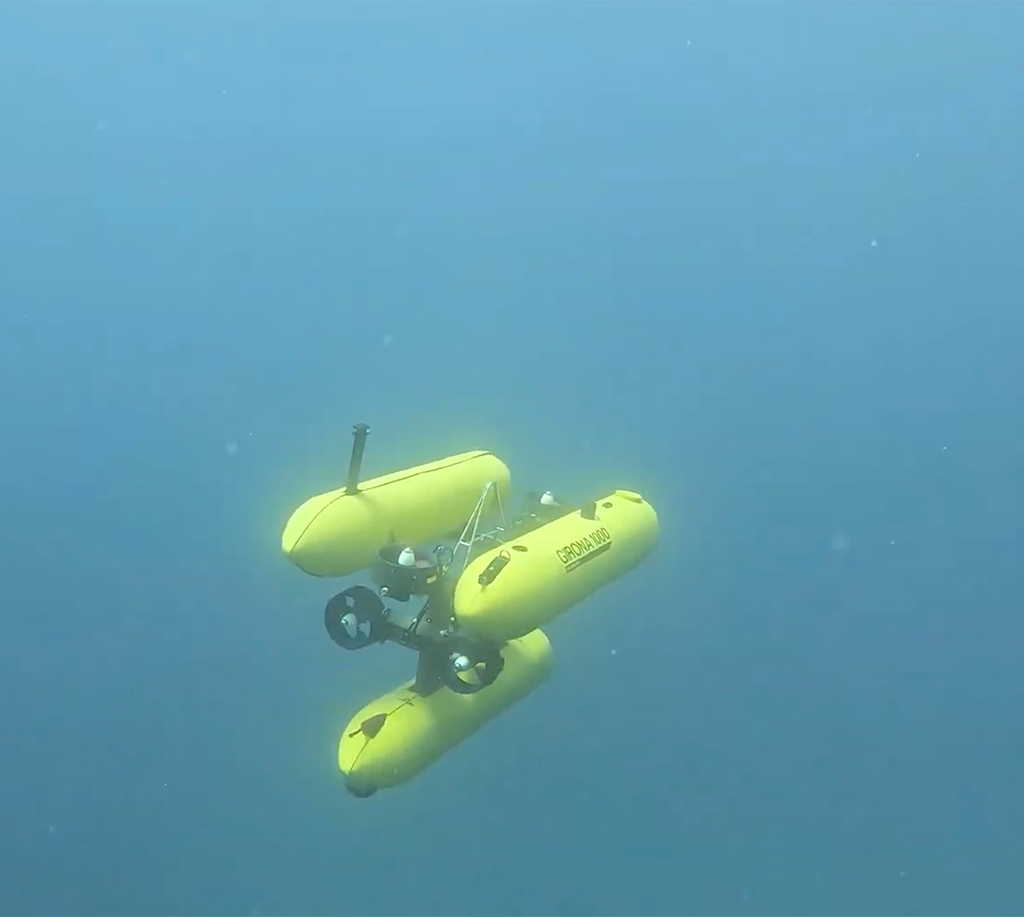
Alaaeddine presented the paper titled “A Docking Station for the Girona I-AUV: Validation by Simulation”. The work, co-authored by Joan Esteba (former PhD at CIRS, now post-doctoral researcher at New York University Abu Dhabi, United Arab Emirates) and members of our research group Patryk Cieslak and Pere Ridao, was accepted to the main technical session. The paper showcases the development process of the docking station for the Girona I-AUV. It evaluated several docking station proposals to choose the most suitable design for the vehicle. The assessment of the proposed designs focused on three critical parameters: structural size, manufacturing cost and operational feasibility. The vertical docking design was ultimately chosen as it demonstrated an optimal balance between these requirements. It also includes several critical innovations: a dual-axis guidance system accommodating ±0.25m positional and ±25◦ yaw tolerances, a secure sliding lock mechanism for underwater station-keeping, and integrated data/power transfer capabilities.

The OCEANS conference was a nice opportunity to share the work we have been doing at Girona with the rest of the underwater robotics and marine science community, to learn what other researchers are doing, and to foster new collaborations with other research institutions.