girona 1000 AUV

| Vehicle specifications | |
|---|---|
|
Height |
1 m |
|
Width |
Width |
|
Length |
1.50 m |
|
Hull diameter |
0.3 m |
|
Weight in air |
from 140 kg |
|
Maximum depth |
1000 m |
|
Energy |
2.9 kWh Li-Ion battery cluster |
|
Endurance |
> 6hrs (Dependent on
configuration) |
| Standard Sensors | |
|---|---|
|
|
• Doppler velocity log |
| Communications | |
|---|---|
|
|
• WiFi |
| Payload | |
|---|---|
|
|
• 35 liters volume available for mission specific equipment. |
| Navigation | |
|---|---|
|
|
• GPS position on surface |
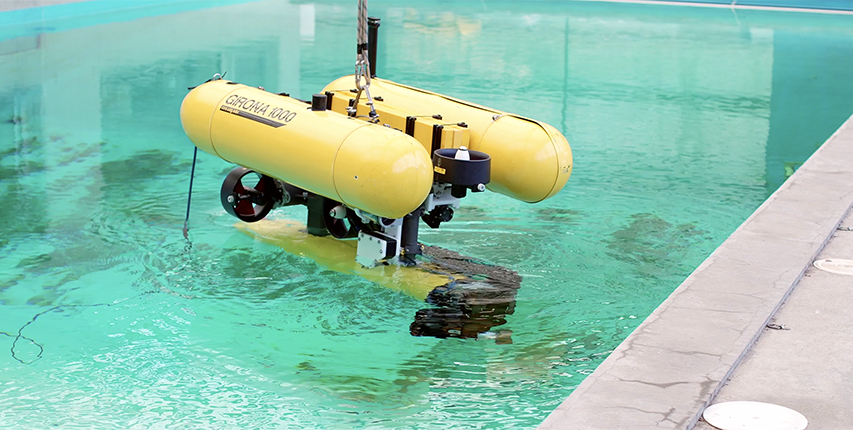
The Girona 1000 is a reconfigurable autonomous underwater vehicle (AUV) designed for a maximum operating depth of up to 1000 m. The vehicle is composed of an aluminium frame which supports three torpedo-shaped hulls of 0.3 m in diameter and 1.5 m in length as well as other elements like the thrusters.This design offers a good hydrodynamic performance and a large space for housing the equipments while maintaining a compact size which allows to operate the vehicle from small boats.
The overall dimensions of the vehicle are 1 m in height, 1 m in width, 1.5 m in length and a weight of less than 200 Kg. The two upper hulls, which contain the flotation foam and the electronics housing, are positively buoyant, while the lower one contains the more heavy elements such as the batteries and the payload.This particular arrangement of the components makes the separation between the centre of gravity and the centre of buoyancy about 11 cm, which is significantly more than any typical torpedo shape design. This provides the vehicle with passive stability in pitch and roll, making it suitable for imaging surveys.
The most remarkable characteristic of the Girona 1000 is its capacity to reconfigure for different tasks. On its standard configuration, the vehicle is equipped with typical navigation sensors (DVL, AHRS, pressure gauge and USBL) and can have basic survey equipment (profiler sonar, side scan sonar, video camera and sound velocity sensor). In addition to these sensors, almost half the volume of the lower hull is reserved for mission-specific payload such as a stereo imaging system or even an electric arm for manipulation tasks.
The same philosophy has been applied to the propulsion system. The basic configuration has 4 thrusters, two vertical to actuate the heave and pitch and two horizontal for the yaw and surge. However, it is possible to reconfigure the vehicle to operate with only 3 thrusters (one vertical and two horizontal), or add extra lateral thrusters to control the sway motion.
GIRONA AUV Payloads
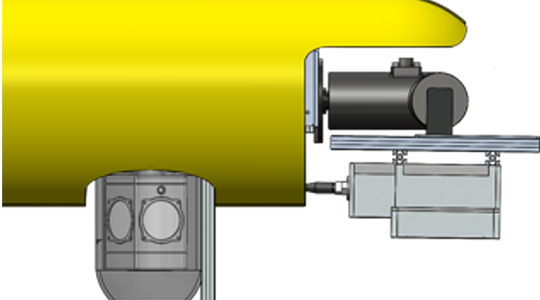

Stereo & MBES
The high-resolution seafloor mapping payload combines an Imagenex Delta T Multibeam Echosounder (MBES) with two high-resolution photographic cameras to deliver detailed bathymetric and visual data. The Delta T MBES provides precise 3D mapping of seafloor topography, while the cameras capture high-quality images, mounted in a down-looking configuration for optimal coverage and photogrammetry. Synchronized operation ensures alignment between sonar and photographic data, enabling the creation of accurate 3D models with both topographic and visual details. Ideal for habitat mapping, archaeological surveys, and subsea inspections, this payload offers comprehensive seafloor characterization for scientific research and industrial applications.
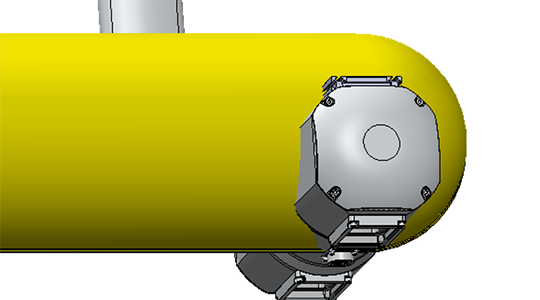
Pan & Tilt MBES +360 cam
The GIRONA AUV can be equipped with an advanced payload for underwater exploration, featuring an Imagenex Delta T Multibeam Echosounder (MBES) mounted on a ROS pan-and-tilt unit and a Ladybug 360° panoramic camera system:
- The MBES provides high-resolution sonar mapping, while the pan-and-tilt unit enables precise orientation for scanning complex structures.
- The Ladybug system captures seamless 360° imagery in high resolution, offering visual context to sonar data.
This synergy allows the GIRONA AUV to excel in applications like seafloor mapping, habitat monitoring, and subsea inspections, delivering accurate, multi-sensor datasets for scientific research and industrial operations.