SPARUS II AUV
| Vehicle specifications | |
|---|---|
|
Length: |
1.6 m |
|
Hull diameter: |
0.23 m |
|
Max width: |
0.46 m |
|
Weight in air: |
52 kg |
|
Maximum depth: |
200 m |
|
Energy: |
1.9 kWh Li-Ion battery system |
|
Endurance: |
8-10hrs (Dependent on
configuration) |
|
Max surge velocity: |
3 knots |
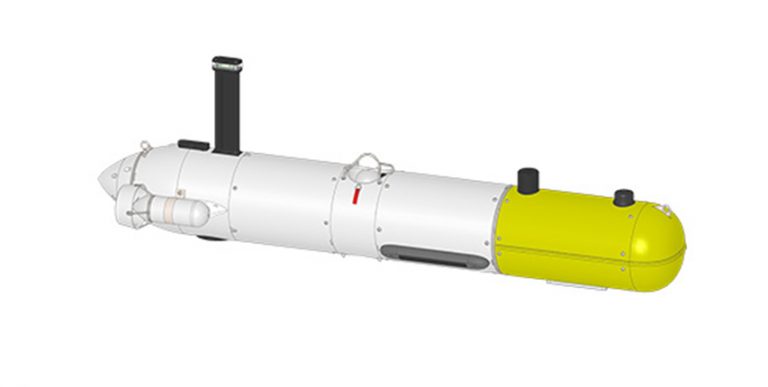
SPARUS II AUV is a lightweight hovering vehicle with mission-specific payload area and efficient hydrodynamics for long autonomy in shallow water (200 meters). It combines torpedo-shape performance with hovering capability. It is easy to deploy and to operate. The payload area can be customized by the end user and it uses an open software architecture, based on ROS, for mission programming. Its flexibility, easy operation and openness makes the SPARUS II AUV a multipurpose platform that can adapt to industrial, scientific and academic applications.
• Torpedo-shaped for efficient hydrodynamics and better autonomy
• Hovering capable, high maneuverability
• Lightweight
• Easy operation. It can be deployed by 2 people from any boat
• Open hardware for easy payload integration
• ROS-based software architecture
• Low cost
Sparus II AUV Payloads
Seafloor Mapping
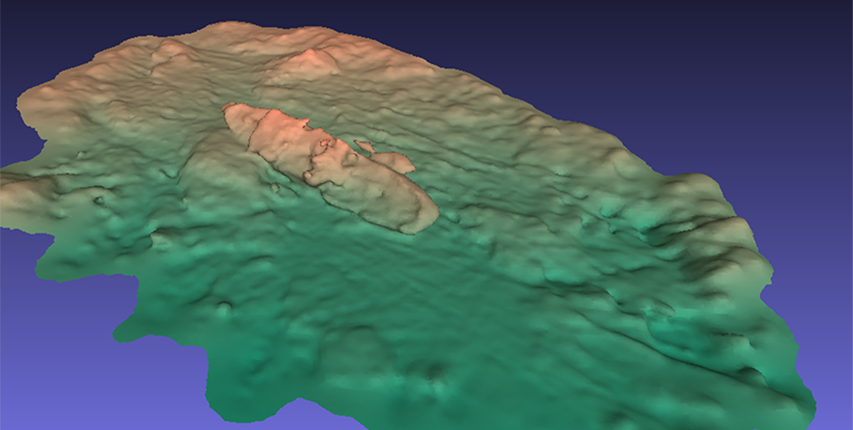
The SPARUS II AUV features a versatile payload for detailed underwater mapping and inspection. It includes five echosounders for precise distance measurements and terrain-following capabilities. A down looking Imagenex Delta T Multibeam Echosounder (MBES) provides high-resolution bathymetric mapping of the seafloor. Complementing this is a Tritech Micron mechanical scanning imaging sonar, offering detailed acoustic imagery and obstacle detection in complex environments. A down looking camera captures detailed visual data, enabling photogrammetry and visual inspections. This integrated payload combines acoustic and visual modalities, making it ideal for habitat mapping, archaeological surveys, infrastructure inspections, and other detailed underwater exploration tasks.
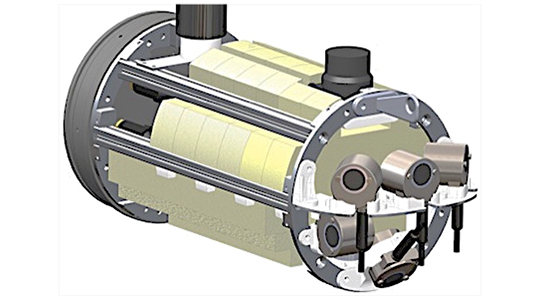
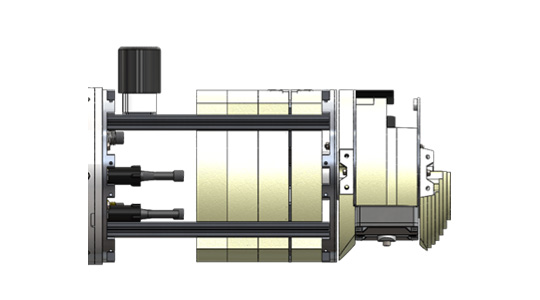
Rotative Stereo Head
The SPARUS AUV features a specialized payload developed for the MORPH FP7 project, integrating a rotative stereocamera for high-resolution mapping of the seafloor and vertical walls. The stereocamera system provides 3D visual reconstructions by capturing paired images, enabling precise measurements and detailed models of underwater environments. The rotative mount allows the camera to adjust its orientation dynamically, ensuring comprehensive coverage of horizontal and vertical surfaces. Designed for flexibility, the system supports diverse mapping tasks, from complex seafloor topography to steep underwater structures. This payload excels in applications like habitat monitoring, archaeological exploration, and subsea infrastructure inspection.
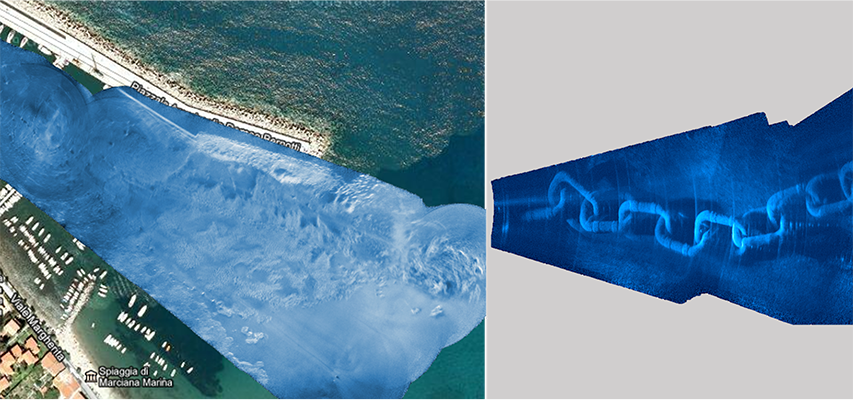
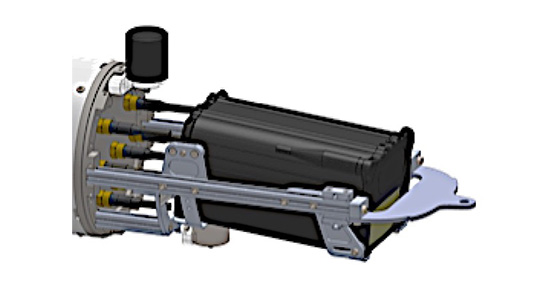
Sonar Mosaicing
The SPARUS AUV is equipped with a SoundMetrix AIRIS multibeam forward-looking sonar, offering high-resolution acoustic imaging for navigation, mapping, and inspection tasks. The sonar generates detailed frames of the underwater environment, ideal for capturing complex structures and obstacles. Using the Iqua SoundTiles software, these frames can be compounded into high-resolution sonar mosaics, providing a comprehensive and precise acoustic map of the surveyed area. This payload is particularly suited for tasks requiring detailed forward-facing imaging, such as infrastructure inspections, archaeological surveys, and habitat assessments, ensuring accurate, high-quality results for scientific and industrial underwater operations.