
Participation at OCEANS 2025 in Brest
From June 16th to 19th, Valerio Franchi and Alaaeddine El Masri El Chaarani participated at OCEANS 2025, held in Brest,
From June 16th to 19th, Valerio Franchi and Alaaeddine El Masri El Chaarani participated at OCEANS 2025, held in Brest,
On June 6, 2025, we celebrated a milestone event in underwater robotics research: the inauguration of a new testing pool.

From May 19th to 24th, Hayat Rajani and Valerio Franchi participated at the IEEE International Conference on Robotics and Automation
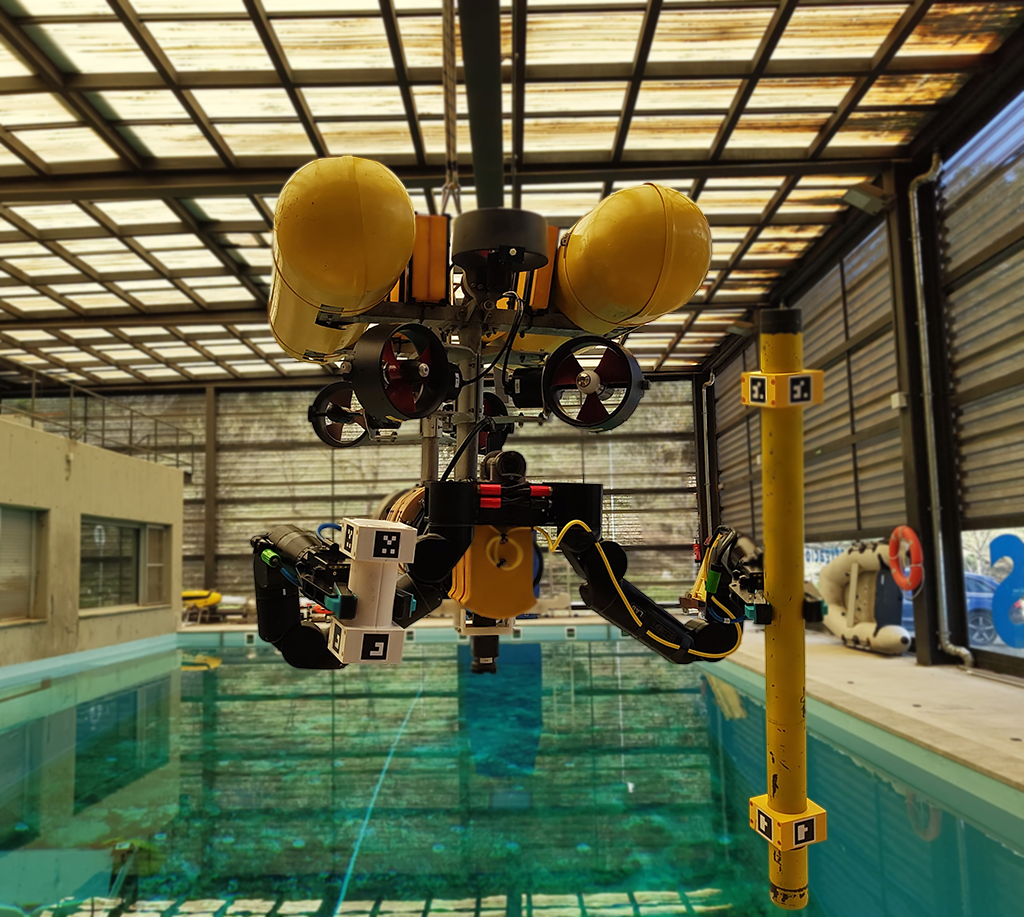
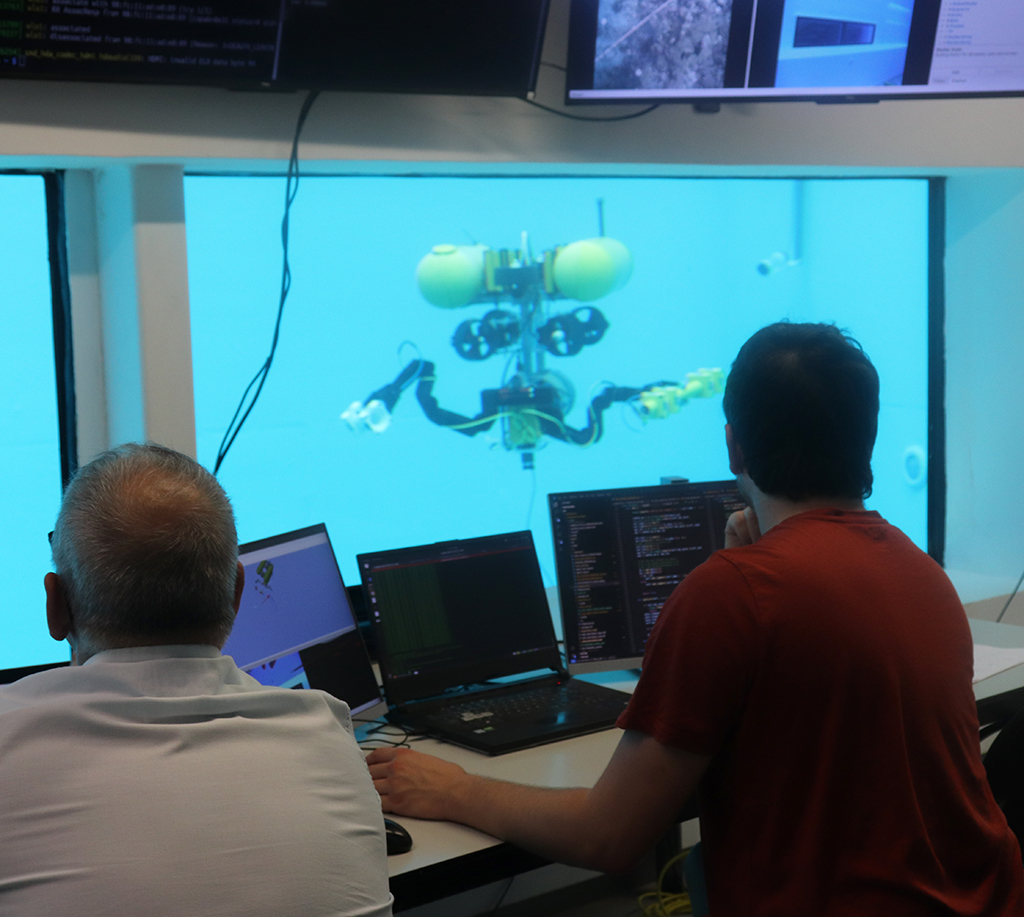
As part of the COOPERAMOS project, led by the University of Girona, research is being conducted to push the boundaries

Avui és un dia especial per al nostre equip del CIRS – centre d’investigació en robòtica submarina. Hem inaugurat el

On September 19th, the University of Girona (UdG) hosted a day induction event to welcome the new cohort of students

By: Roger Pi Roig Supervised by: Dr. Pere Ridao Rodríguez / Dr. Narcís Palomeras Rovira Abstract: The interest in