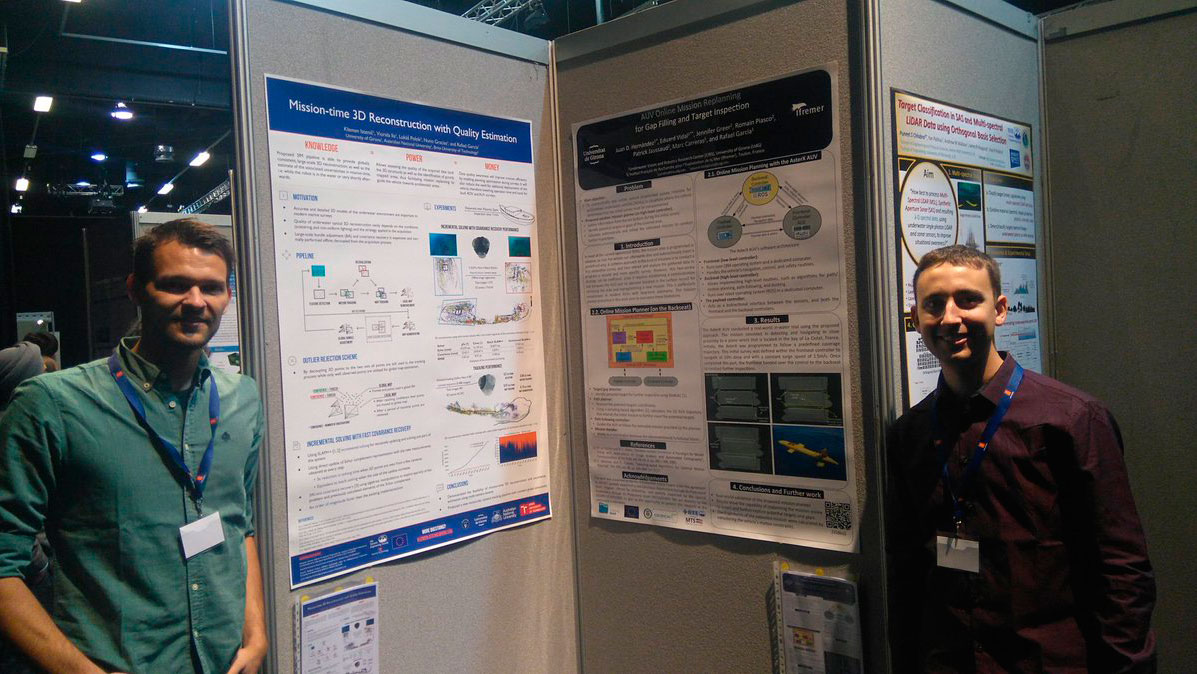
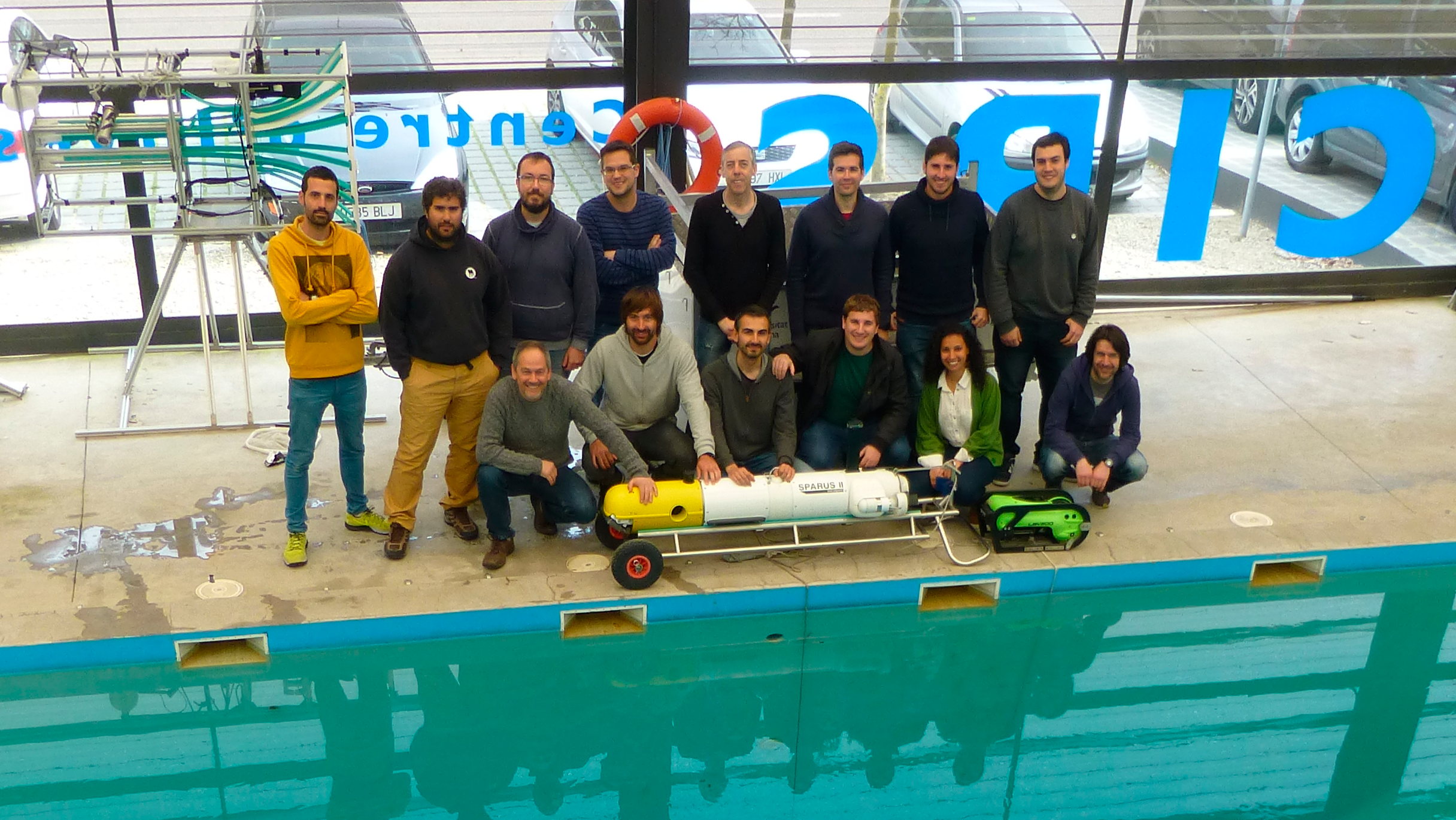
Six members of ViCOROB attend the Breaking the Surface summer school in Croatia
BtS (Breaking the Surface) is a summer workshop that encourages interaction and the exchange of knowledge and experience about the maritime robotics field and its applications. In 7 days, participants get first-hand knowledge about the latest in scientific research and results, technological achievements as well as hands-on experience in working…