In CIRS, News, Sonar Mosaicing, THESIS, Underwater Mapping by cirs-media

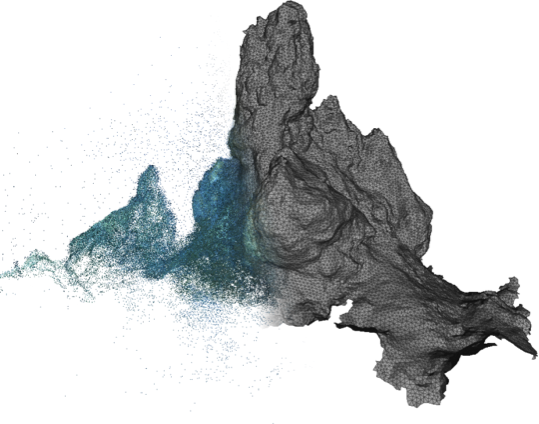
Underwater maps are an important source of information for the scientific community, since mapping the seafloor is the starting point for underwater exploration. The advance of range scanning methodologies, both using acoustic and optical techniques, enables the mapping of the seabed to attain increasingly larger resolutions. However, all these techniques…

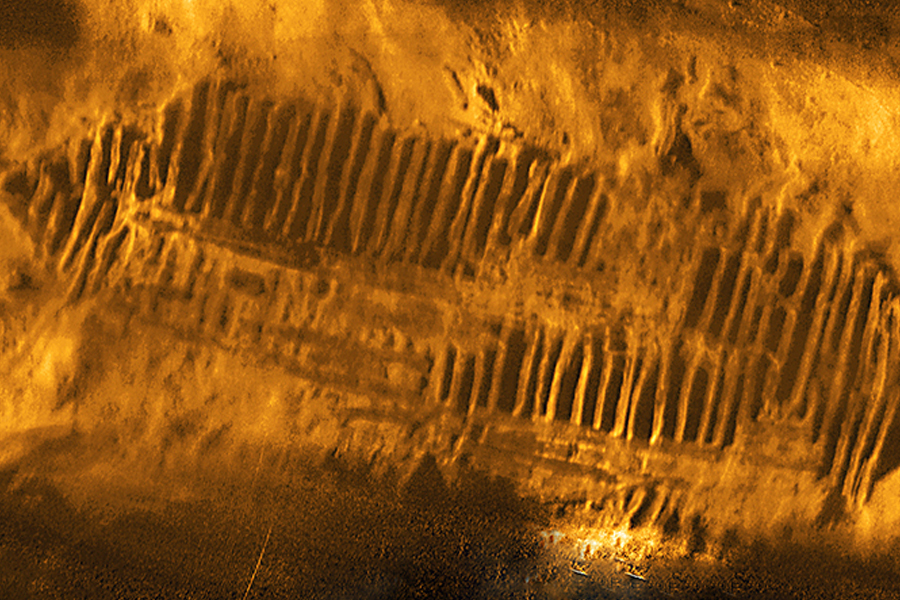
This thesis presents the development of a localization and mapping algorithm for an autonomous underwater vehicle (AUV). It is based on probabilistic scan matching of raw sonar scans within a pose-based simultaneous localization and mapping (SLAM) framework. To address the motion-induced distortions affecting the generation of full sector scans,…
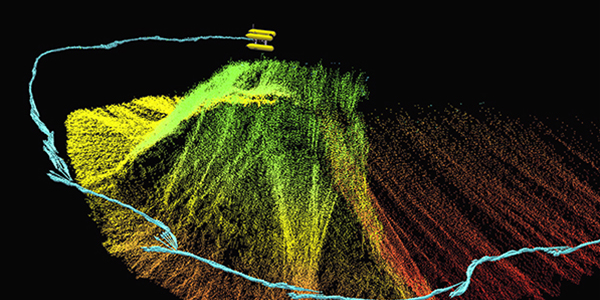
Doctoral thesis “Coverage Path Planning for Autonomous Underwater Vehicles” By Enric Galceran, PhD student of the Doctoral Program in Technology Supervised by Dr. Marc Carreras Pérez Abstract At present, a mission to survey the ocean floor with an Autonomous Underwater Vehicle (AUV) is typically planned by selecting a list…
PhD Thesis “Automated underwater object classification using optical imagery” By Shihavuddin, A.S.M Supervised by Dr. Nuno Grácias, Dr. Rafael García Abstract This thesis addresses the problem of automated underwater optical image characterization. Remote underwater optical sensing allows the collection and storage of vast amounts of data for which manual…