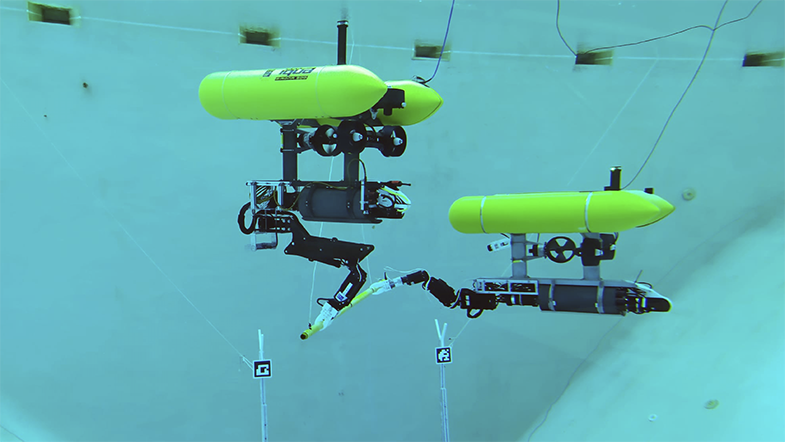
TWIN roBOTs for cooperative underwater intervention missions
TWINBOT is a project that aims to develop a new kind of I-AUVs able to work autonomously in a cooperative way. The underwater inspection, maintenance and repair operations are becoming the main focus of the research in underwater robotics. Due to the desire of using small, autonomous vehicles instead of…