In CIRS, Dissemination, News by cirs-media
2a edició del campus PRESUB – robòtica submarina educativa
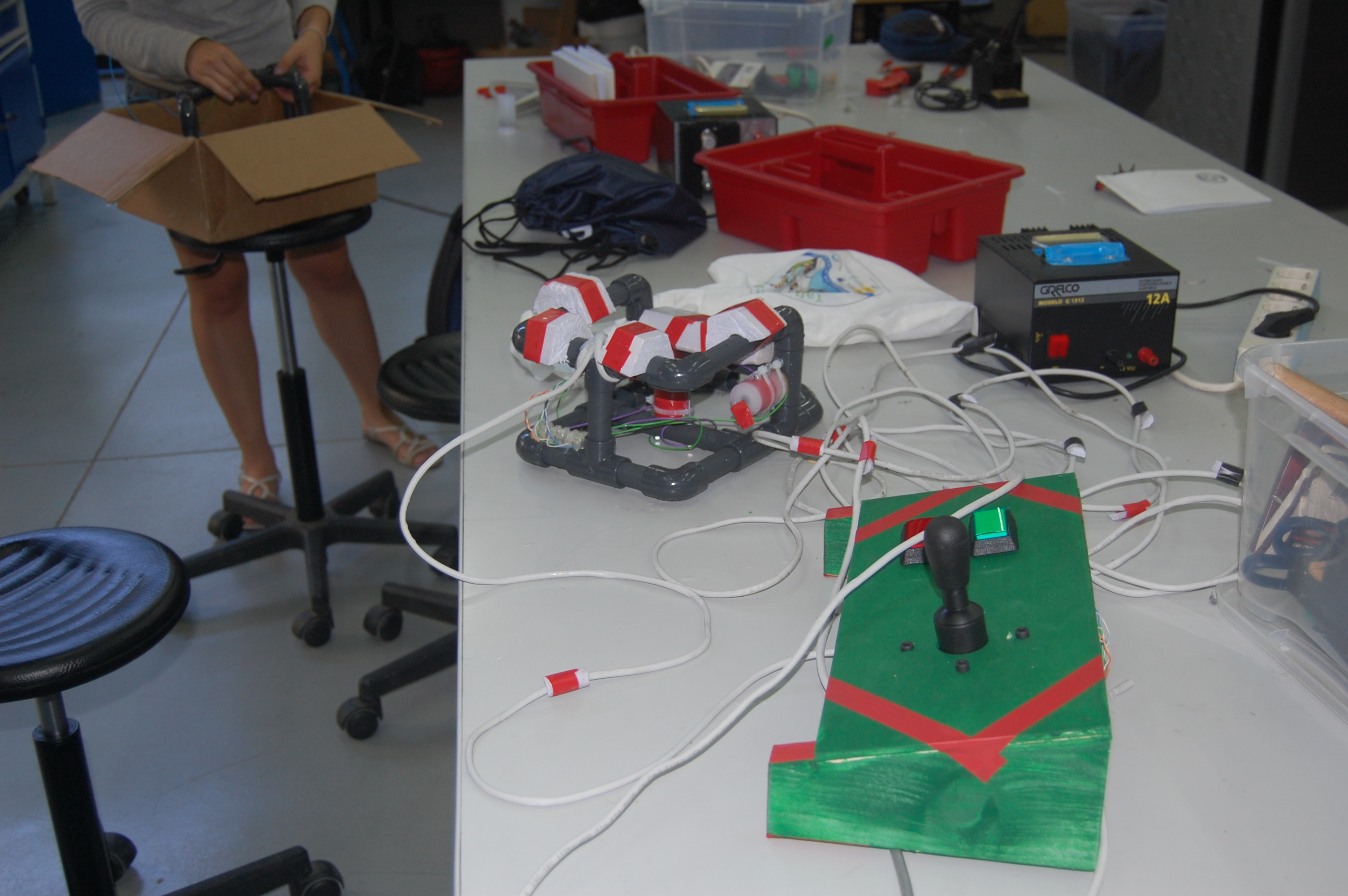
Del 7 al 11 de juliol va tenir lloc la segona edició del Campus PRESUB a les instal•lacions del Centre de Robòtica Submarina (Parc Científic i Tecnològic), amb la participació d’ una vintena d’estudiants de secundària de diferents centres de les comarques gironines. L’objectiu bàsic d’aquests tallers és la realització…